Ein Autofahrer muss in der Lage sein das Verkehrsgeschehen zu erfassen, mögliche Szenarien abzuwägen, sich für eins zu entscheiden und die entsprechende Reaktion in einer angemessenen Zeit durchzuführen. Sensible Sensoren und künstliche Intelligenz (KI) sollen es möglich machen in Zukunft auf einen Fahrer zu verzichten und das Fahrzeug vollkommen selbständig fahren zu lassen.
KI ist bereits heute in Fahrzeugen im Einsatz und kann z.B. dem Fahrer anhand seiner Gewohnheiten eine Route oder eine Telefonnummer vorschlagen oder mittels Spracherkennung das Infotainment-System steuern.
Im Unterschied zu einem gängigen Computerprogramm, das nach dem Wenn-Dann-Prinzip funktioniert, wird bei einer KI nicht jede Situation vorprogrammiert. Die selbstlernenden Algorithmen werden mit immer komplexeren Aufgaben konfrontiert, die sie anhand vorheriger Erfahrungen lösen können. Damit die KI in jeder Verkehrssituation richtig reagiert, muss sie mit unzähligen Daten gefüttert werden. Entwickler von autonomen Fahrzeugen lassen ihre KI deshalb viele Kilometer abfahren und verschiedene Verkehrssituationen trainieren. Je mehr Daten die KI "erfahren" hat, desto besser wird sie, nicht unähnlich einem Menschen, der mit mehr Wissen in einem Bereich besseres leisten kann.
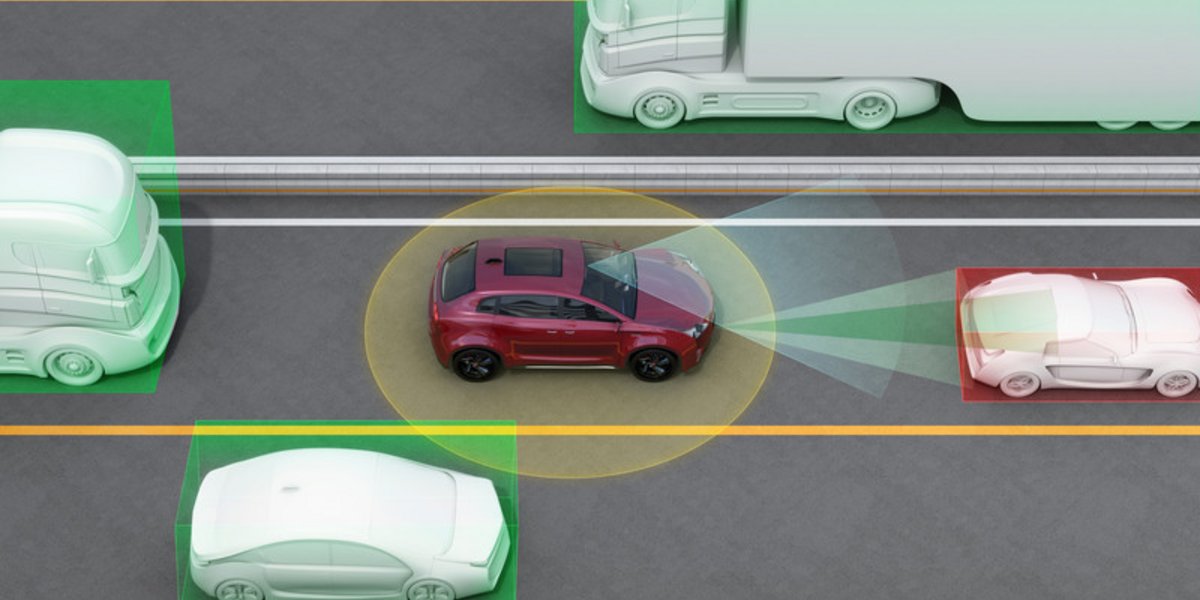
Mehrere Sensoren ersetzen dabei den Fahrer und liefern die benötigten Informationen. Die Aufgaben des menschlichen Auges übernehmen in autonomen Fahrzeugen mehrere technische Systeme, die verschiedene Situationen wie unterschiedliche Sichtverhältnisse oder Entfernungen abdecken:
Videokameras liefern der KI an Bord reale Bilder der Umgebung und ermöglichen das Erkennen von weiteren Verkehrsteilnehmern, einschliesslich Fussgängern und Velofahrern, sowie von Verkehrszeichen und Fahrbahnmarkierungen. Sie sind nach vorne, nach hinten und zur Seite gerichtet. Bei Dunkelheit bieten Infrarotkameras eine bessere Leistung.
Die Entfernung zu anderen Objekten kann mittels Kurzstrecken- und Langstreckenradars erfasst werden. Ein Beispiel dafür ist der in manchen Autos eingebauter Bremsassistent: Treffen die ausgesandten Radiowellen z. B. auf ein vorausfahrendes Auto, werden sie mit veränderter Frequenz zurückgeworfen. Aus dieser Frequenzveränderung und der Laufzeit der Signale ergibt sich die relative Geschwindigkeit bzw. der Abstand zwischen den Fahrzeugen. Auch Radars können in mehreren Richtungen installiert werden und ihre Signale zusammen ausgewertet werden. Es ist auch möglich die Signale fremder Fahrzeuge miteinzubeziehen. Radar kommt auch mit schlechten Wetterbedingungen wie Regen oder Nebel zurecht.
Eine Alternative zum Radar ist das Lidar (Light Detection and Ranging). Das Funktionsprinzip ist das gleiche, nur dass – für das menschliche Auge sichere – Laserstrahlen statt Radiowellen emittiert und detektiert werden. Der Vorteil vom Lidar gegenüber dem Radar ist, dass es ein sehr akkurates dreidimensionales Bild der Umgebung liefern kann. Allerdings stosst es bei Entfernungen unter 30 Metern sowie bei schlechten Sichtverhältnissen (Schnee, Regen, Nebel, Staub) an seine Grenzen. Deshalb muss es auch mit weiteren Systemen wie Kameras und Ultraschall kombiniert werden. Ultraschall, der z B. bei der Einparkhilfe verwendet wird, misst die Entfernung zu Hindernissen und kann bei geringen Fahrgeschwindigkeiten eingesetzt werden.
Zur Gewährleistung der Sicherheit müssen Systeme redundant d.h. doppelt vorhanden sein. So können z.B. zwei Kabelsätze integriert oder zwei voneinander unabhängige Bremssysteme eingebaut sein.
Nicht nur bei der Entwicklung der Sensoren liefert sich die Industrie ein Wettrennen. Auch die Erstellung hochpräziser 3D-Navigationskarten wird auf Hochtouren vorangetrieben, da sie für die Positionierung und Streckenführung des Fahrzeugs mittels GPS unerlässlich sind.
KI benötigt eine Unmenge an Rechenleistung. Etwa 4000 Gigabyte an Daten wird ein vollständig autonomes Fahrzeug am Tag generieren. Das wiederum wird entsprechend viel Energie in Form vom Strom brauchen, die das Auto im Akku mit sich wird führen müssen.